
| なる研>電子工作小品集>窮鼠Andante(ライントレースロボット) |
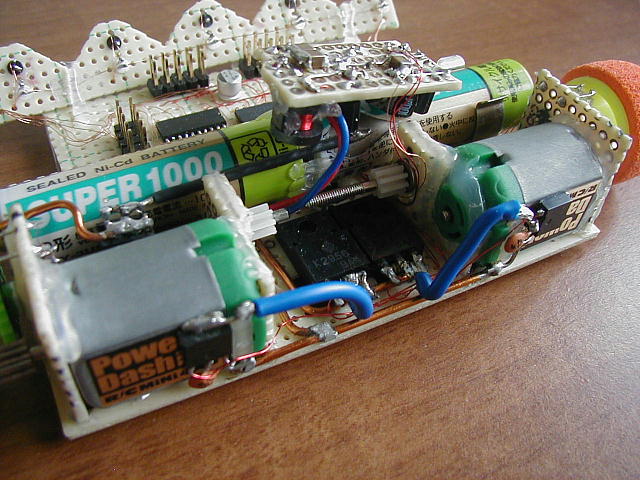
JMCR(JapanMiconCarRally)2005に出走しました| 車 長 | 88mm(センサ込み) | 駆動モータ | 田宮パワーダッシュモータx2 |
| 車 幅 | 136mm | 駆動系電圧 | 1.2V NiCd電池 2cell直列 1.8〜3.1V |
| 車 高 | 33mm | 制御系電圧 | 駆動系電圧を昇圧 5V |
| 重 量 | 電池抜き:105g 電池込み:152g | ギヤ比 | 8:30 |
| ロータリエンコーダ | 分解能:11[mm/pulse] 2個 | タイヤ、ホイール | 田宮レストンスポンジタイヤ |
| ラインセンサ | TPS612,TLN113 アナログ 5組 有効範囲:50[mm]、分解能:0.065[mm/step] | ||
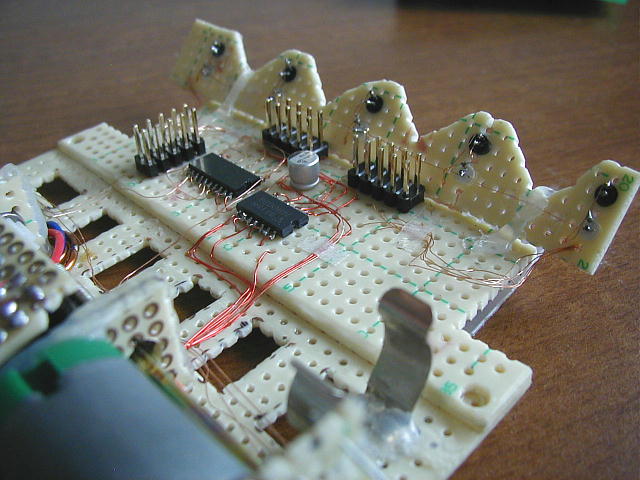
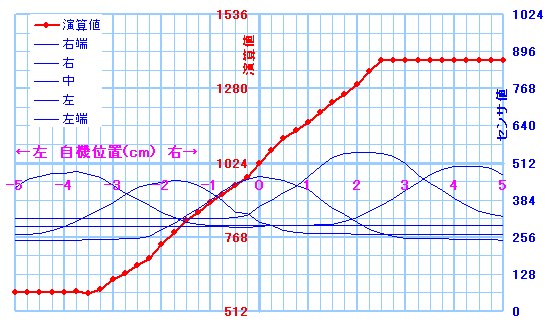 去年Largoでは、センターラインを見るセンサが2組しかなく、有効範囲が25[mm]と狭かったので、すぐにセンターラインを見失い、すぐにライントレースを諦めてしまう根性なしでした。
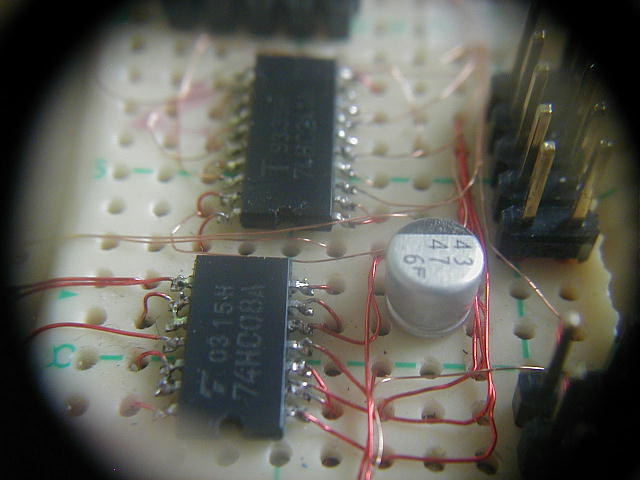
去年Largoでは、センターラインを見るセンサが2組しかなく、有効範囲が25[mm]と狭かったので、すぐにセンターラインを見失い、すぐにライントレースを諦めてしまう根性なしでした。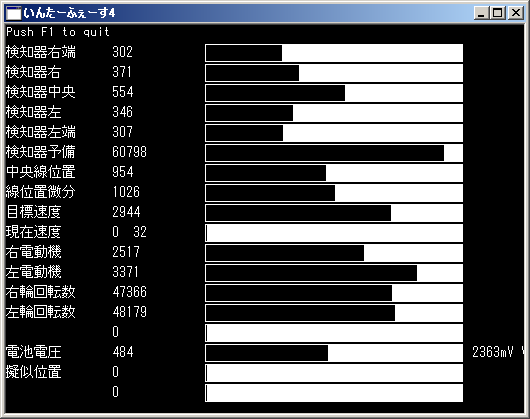 これもパワーアップしました。各値を、4bitずつ4回に分けて送ることで、16bitで見られるようにしました。
これもパワーアップしました。各値を、4bitずつ4回に分けて送ることで、16bitで見られるようにしました。 規則で単3と定められているので、電池の候補は、オキシライド、ニッケル水素(NiMH)、ニッカド(NiCd)、です。窮鼠はモータ2つが合わせて定格5[A]ピーク20[A]を要求し、5[V]昇圧DC-DCコンバータは1.5[V]以上を要求します。
規則で単3と定められているので、電池の候補は、オキシライド、ニッケル水素(NiMH)、ニッカド(NiCd)、です。窮鼠はモータ2つが合わせて定格5[A]ピーク20[A]を要求し、5[V]昇圧DC-DCコンバータは1.5[V]以上を要求します。 |
 |
 |

|

|
 |
  |
|
|
| J1 | 1 | Vcc | CPUへ電源供給 |
| 2 | P77/AN7 | 電池電圧監視 | |
| 3 | P76/AN6 | NC | |
| 4 | P75/AN5 | ラインセンサF | |
| 5 | P74/AN4 | ラインセンサE | |
| 6 | P73/AN3 | ラインセンサD | |
| 7 | P72/AN2 | ラインセンサC | |
| 8 | P71/AN1 | ラインセンサB | |
| 9 | P70/AN0 | ラインセンサA | |
| 10 | GND | NC | |
| J2 | 1 | Vcc | NC |
| 2 | PA7/TP7/A20/TIOCB2 | 左ブレーキ | |
| 3 | PA6/TP6/A21/TIOCA2 | 右ブレーキ | |
| 4 | PA5/TP5/A22/TIOCB1 | CPU出力バッファ動作許可 | |
| 5 | PA4/TP4/A23/TIOCA1 | 左モータ(PWM) | |
| 6 | PA3/TP3/TCLKD/TIOCB0 | CPU出力バッファ動作許可 | |
| 7 | PA2/TP2/TCLKC/TIOCA0 | 右モータ(PWM) | |
| 8 | PA1/TP1/TCLKB | 左ロータリエンコーダ監視 | |
| 9 | PA0/TP0/TCLKA | 右ロータリエンコーダ監視 | |
| 10 | GND | CPUへ電源供給 | |
| J3 | 1 | Vcc | NC |
| 2 | PB7/TP15/DREQ1/ADTRG | 両ロータリエンコーダ動作許可 | |
| 3 | PB6/TP14/DREQ0 | NC | |
| 4 | PB5/TP13/TOCXB4 | ラインセンサF LED | |
| 5 | PB4/TP12/TOCXA4 | ラインセンサE LED | |
| 6 | PB3/TP11/TIOCB4 | ラインセンサD LED | |
| 7 | PB2/TP10/TIOCA4 | ラインセンサC LED | |
| 8 | PB1/TP9/TIOCB3 | ラインセンサB LED | |
| 9 | PB0/TP8/TIOCA3 | ラインセンサA LED | |
| 10 | GND | NC | |
| J8 | 13 | P53/A19 | PUSH SW |
| 14 | P52/A18 | PUSH SW | |
| 15 | P51/A17 | PUSH SW | |
| 16 | P50/A16 | PUSH SW | |
| SW | 1 | P63/AS | DIPSW MSB |
| 2 | P62/BACK | DIPSW | |
| 3 | P61/BREQ | DIPSW | |
| 4 | P60/WAIT | DIPSW LSB |
| 名前 | 数 | 価格 |
| 電解コンデンサ47uF | 1 | 50 |
| 74HC08 | 1 | 40 |
| 74HC241 | 1 | 50 |
| チップトランジスタ2SC3325 | 2 | 30 |
| チップトランジスタ2SA1313 | 2 | 30 |
| セラミックコンデンサ10nF | 2 | 40 |
| Pch FET J439 | 2 | 400 |
| Nch FET K2956 | 2 | 500 |
| パワーダッシュモータ | 2 | 700 |
| 真鍮ピニオンギア | 2 | 20 |
| ミニ四駆平ギア | 2 | ? |
| ミニ四駆6角シャフト | 2 | ? |
| レストンスポンジタイヤ | 2 | 300 |
| 小径ホイール | 2 | 200 |
| ボールベアリング | 4 | 600 |
| 秋月B基板 | 2 | 220 |
| 焼肉のたれ容器 | 1 | 0 |
| フォトトランジスタTPS612 | 7 | 420 |
| 赤外LED TLN113 | 5 | 300 |
| ジャンクマウスの赤外LED | 2 | 100 |
| 1000mAh NiCd電池 | 6 | 1800 |
| 単3電池ホルダ | 1 | 20 |
| ピンヘッダ プラグ | 30列 | 100 |
| 10uFチップ積セラコン | 3 | 60 |
| 100uF電解コン | 2 | 40 |
| コイルコア | 1 | 80 |
| トランジスタ2SC1815 | 1 | 10 |
| トランジスタ????? | 1 | 400 |
| 3端子レギュレータS813 50HC | 1 | 50 |
| チップ抵抗 | 17 | 17 |
| チップ積セラコン 100nF | 3 | 3 |
| 直径2mmUEW | 適量 | 5 |
| 直径0.3mmUEW | 適量 | 5 |
| 直径0.12mmUEW | 適量 | 5 |
| エポキシ樹脂接着剤 | 適量 | 100 |
| ほっとボンド樹脂 | 適量 | 20 |
| 半田 | 適量 | 10 |
| だいたい合計 | 9000 | |