知能ロボットコンテスト2007
2005/06 4th 03p
6/25 仙台知能ロボコン。惨敗。多重に負けた。
まず、当初の複数協調動作をあきらめたことで負けた。
さらに、チャレンジボールをあきらめて負けた。
さらに、自由ボールも入れられなくて負けた。
レヴェルが高い。
2007/01 4th 05p
知能ロボットコンテストのサイトがひっそりと更新されてる。
今年は2007/06/23,24で、5/25締切の映像審査があるらしい。
参加は上の問題次第。
2007/03 1th 02p
知ロボもそろそろ始めないと映像審査に間に合わなそうなので、とりあえずマイルストーンを仕掛ける。4月上旬まで:仕様収束。4下:回路組み込み。5中:下層ファーム、映像審査。6上:上層ファーム。
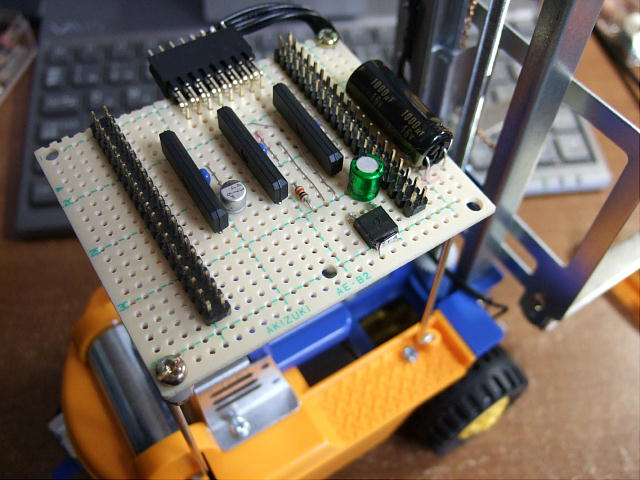
実は機械的な部分は既にほぼ完成している。田宮フォークリフト工作セットにセンサやドライバを乗せてでっちあげる作戦でいこうかと思案中。
2007/03 2th 03p
2007/03 3th 02p
2007/03 3th 03p
Trevaの入手に成功した。
モックからコネクタを採れるらしいということで秋葉原を探したけど、かなり昔の機種なのでさすがになかった。
それから、死蔵していたInterface2006年6月号を引っ張り出してもぞもぞ。
よくみるとかなり使えそうな、内蔵RAMが8kBで48MHzで動くSH2/7144F基板。RAM増設したいけどSRAMは入手困難。
紙面によると、2008年4月まではESP企画からSRAMとLV08のセットが\3000で買える(かもしれない)らしい。
2007/03 4th 01p

 とりあず、モノクロでやってみた。もう少し綺麗にでても良い気がする(右)。
ビットがズレてた。修正すると想像以上に綺麗(左)。
とりあず、モノクロでやってみた。もう少し綺麗にでても良い気がする(右)。
ビットがズレてた。修正すると想像以上に綺麗(左)。
2007/03 4th 02p
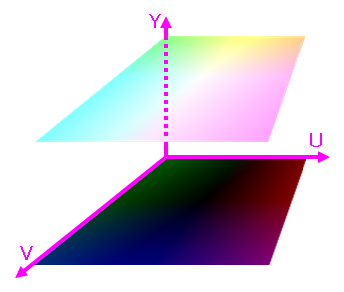 取り出せるのはYUV(YCbCr)で、
せっかく色情報が2次元(CbCr)に落とされてるからRGBに変換する必要はないと思う。
ところが実際にYUV空間を表示してみたら、RGB空間より判定しにくそう。
色情報は1次元まで落としたい。HSVに変換して色相Hで見ればいいのかな。
取り出せるのはYUV(YCbCr)で、
せっかく色情報が2次元(CbCr)に落とされてるからRGBに変換する必要はないと思う。
ところが実際にYUV空間を表示してみたら、RGB空間より判定しにくそう。
色情報は1次元まで落としたい。HSVに変換して色相Hで見ればいいのかな。
2007/03 4th 03p
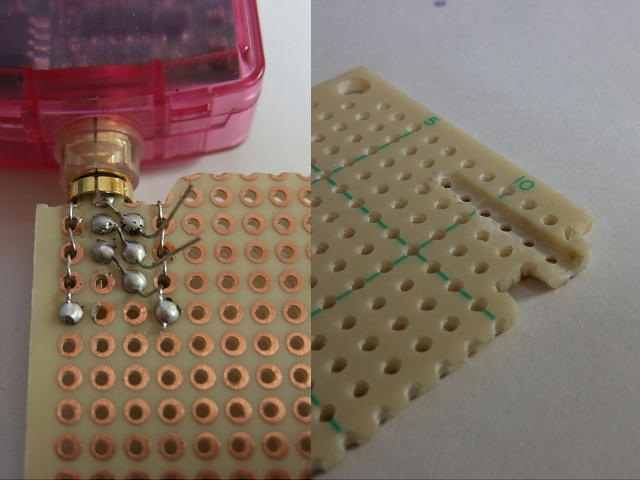
 コネクタ作ってみた。紙エポ基板を2枚重ねて、2.5mmのドリルで狭間に穴を掘る。
片方にスズメッキ線の電極を付ける。
2枚をスズメッキ線で縫い合わせて半田で固定。
取り込めてるけど、信頼性があやしい。
コネクタ作ってみた。紙エポ基板を2枚重ねて、2.5mmのドリルで狭間に穴を掘る。
片方にスズメッキ線の電極を付ける。
2枚をスズメッキ線で縫い合わせて半田で固定。
取り込めてるけど、信頼性があやしい。
2007/03 5th 01p
V850基板付きInterface入手。20MHz,ROM256KB,RAM24KB。
miniBコネクタのパタンもあるとよかった。
RAMがでかいので、知ロボはこれで行こうかと思う。
でもこの周波数では画像処理はつらい鴨。
去年のSH2(48MHz)とどっちがいいかな。
2007/04 1th 02p
V850をいじる。
パイプラインにしたら、その分クロック上げられるんじゃないかな?
5段パイプラインなら、1段20MHzで、100MHz位欲しい。
データシートが曖昧で、いちいち予測して正しいことを確認しないといけないから、読みにくい。
travaプログラムを移植して動かす、も動かない。orz。
2007/04 1th 03p
知ロボ。
ルールの方は、動画は必須ではなく、まともな写真をageればいいことになったらしい(幸か不幸か)。
ちょっと遅れ気味。
2007/04 2th 05p
V850。P0.5が利かなかったみたい。P0.4に変更したら動くようになった。
2007/04 3th 01p
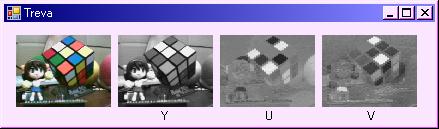 やっとカラーにした。
VYUYVYU...VYUYの配列だから、単純にYが来るたびに画素を生成してると、偽色が発生しやすくなる罠。
勿体無いけど、最後のYは捨ててx方向95画素ってことで。
やっとカラーにした。
VYUYVYU...VYUYの配列だから、単純にYが来るたびに画素を生成してると、偽色が発生しやすくなる罠。
勿体無いけど、最後のYは捨ててx方向95画素ってことで。
2007/04 3th 02p
YUVでは、色情報がUVの2次元に抽出されているように見えるけど、こないだ描いたYUV空間の図によるとYに沿って少しねじれている。ところが、この図を見ながら閾値をテキトーに決めて判別させてみたら、多少ねじれてても問題ないみたい。後で時間ができたら精密に補正しよう。
2007/04 3th 03p
ラベリング処理を追加。面積が出せるようになった。面積の大きいものから順に評価してゆくことにする。
ルックアップテーブルはメモリ食いそうなのでなるべくやりたくない→不安定。
2007/04 3th 04p
 島の重心をだして位置とする。面積が5pix以下の島はゴミとしたほうがいいかも。
島の重心をだして位置とする。面積が5pix以下の島はゴミとしたほうがいいかも。
2007/04 3th 05p
for(A;B;C)D;E;の順序。A B D C B D C B D ... C B E
2007/04 4th 01p
 jujurouさんの情報から、Trevaのコネクタをヨドバシの携帯アクセサリ売り場で探すとあった。\470。
jujurouさんの情報から、Trevaのコネクタをヨドバシの携帯アクセサリ売り場で探すとあった。\470。
2007/04 4th 02p
2007/05 1th 01p
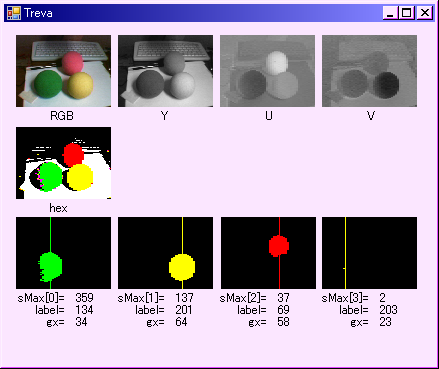
 32x32のルックアップテーブル(LUT)を生成して使うようにする。
32個までの隣接していて同じ色のラベルを一つのラベルにまとめられる。
まとめた後のラベルの数は32個まで。
下のテキストボックスがLUT。
抽象化したhex画像がノイジーでもラベリングのミスはかなり少なくなったけど。。。
32x32のルックアップテーブル(LUT)を生成して使うようにする。
32個までの隣接していて同じ色のラベルを一つのラベルにまとめられる。
まとめた後のラベルの数は32個まで。
下のテキストボックスがLUT。
抽象化したhex画像がノイジーでもラベリングのミスはかなり少なくなったけど。。。
2007/05 1th 02p
LUTだけで32x32=1024バイトも消費する。
さらに、画像全体のラスタスキャンが2回も増える。
しかも、この2回のスキャンでそれぞれ1画素毎にLUTを検索( O(n2) )しないといけない。V850@25MHzでは楽観的にザックリ見積もっても600ms以上かかるorz。
2007/05 1th 03p
掛け算を1クロックでやってくれるのはいいけど、検索をハードウェアで1クロックでやって欲しいな。
2007/05 2th 03p
 ラインの抽出できた(3段目の画像)。かなりやっつけ。
ラインの抽出できた(3段目の画像)。かなりやっつけ。
2007/05 3th 01p
 モータドライバ。
今回は強力なモータを使用しないので、専用ICでいけそう。
だけれども、入手できるドライバICはHブリッジがバイポーラトランジスタで構成されてる。
バイポーラトランジスタでHブリッジすると、NPNのVceとPNPのVceで合わせて1.6V位無駄になる。
貧弱なモータでも、電池4本ではこの1.6Vが勿体無い。
FETならVdsを小さくできるからFETのHブリッジモータドライバICがあればいいんだけど。
貧弱なモータのためにディスクリートで組むほどの余裕は無いのでTA7291SGを使う。
モータドライバ。
今回は強力なモータを使用しないので、専用ICでいけそう。
だけれども、入手できるドライバICはHブリッジがバイポーラトランジスタで構成されてる。
バイポーラトランジスタでHブリッジすると、NPNのVceとPNPのVceで合わせて1.6V位無駄になる。
貧弱なモータでも、電池4本ではこの1.6Vが勿体無い。
FETならVdsを小さくできるからFETのHブリッジモータドライバICがあればいいんだけど。
貧弱なモータのためにディスクリートで組むほどの余裕は無いのでTA7291SGを使う。
2007/05 3th 02p
2007/05 4th 02p
ワイコンレンズキタ。画角がほどよく広くなって、フォークリフトのフォークを視野に入れつつ、ある程度遠くまで見えるようになった。
PCで動かしてたコードをそのままV850で動かしてみる。
画像を取り込み始めてから情報が出てくるまでに6秒もかかるww。
すでにけっこう最適化してあるんだけどな。これ以上やると構造が見づらくなるんだよな。
2007/06 1th 03p
labeling()内のラスタスキャン回数を半分にした。約3秒。
2007/06 1th 04p
各処理工程の計算時間を実際に計ってみると、やっぱりLUTを使った島の結合に時間がかかってるようだ。
ポインタを直接操作したり、
値検索のfor(j=0;j<32;j++)for(i=0;i<32;i++)if(lut[j][i]==l)return lut[j][0];をiの分だけ32個展開したらかなり速くなった。1秒間に2フレーム処理できるようになった。
2007/06 1th 05p
線形探索を多用してるから、画像によって情報が出てくるまでの時間が一定でなくて、しかも分散がかなり大きい。
タイマカウンタを回して、画像を採取した瞬間のタイムスタンプをつけるようにする。
2007/06 2th 04p
重心の求め方。ヒストグラムを出す→各区間の量にその区間の平均座標をかける(=重みつき量)→重みつき量の和を面積で割る。
むだが多い、もっと簡便なほうほうがある。
2007/06 2th 05p
ライントレースとボール探索できた。けど不安定で遅すぎる。
実体だけで制御するにはフレームレートが低いのがネックになる。心眼を使わないとダメだな。
2007/06 3th 01p
2007/06 4th 01p
2007/06 4th 02p
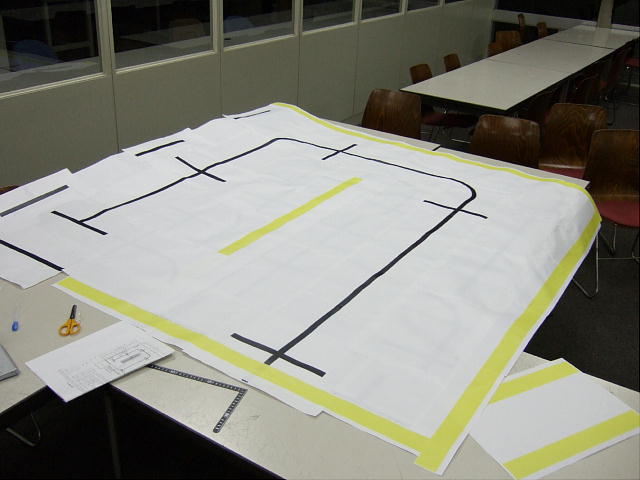
一次予選動画(wmv):自由ボールを入れるも黄色いチャレンジボールを掴み損ねて落としてしまう。リトライ。最初のクロスラインを見落とす。リトライ。今度は緑色のチャレンジボールを掴んだが、黄色いボールに衝突して落としてしまう。さらにボールに乗り上げて走行不能。自由ボールを入れていれば敗者復活戦に参戦できそうなのでリトライせずに終了。
2007/06 4th 03p
敗者復活戦動画(wmv):
一次予選で撮った動画を見てプログラムを変更、ライントレースを少し速く、ボール探索を遅くした。機構的に不安な箇所を紙で補強。
赤のチャレンジボールを掴むがライントレースへの復帰に失敗。
暫くラインを探して復帰でき、赤をゴール。
次にボールのエリアに戻ってくるときに最後のクロスラインを見落とし、ボールのエリアに深く入ってしまう。おかげでボールの選択に迷ったり、ボールの探索に時間がかかったりでタイムアウト。
(動画はエンコードが終わったらageます;)
2007/06 4th 04p
表現力が足りない。処理過程を表示するでかいディスプレイを用意すると井伊鴨。
ボール探索が遅すぎた(動作も実装時期も)。デバグと動作高速化に2週間は必要鴨。
自分のロボットが競技中に片付けをはじめるべきではない。
すぐに答えられなかった問題の答え。フィードバックループの一部なので些細な誤差は気になりません。
2007/06 4th 05p
Intelligentとは?記号着地と推論が主な問題。
2007/07 3th 03p
【最新】 かてごり 逆順
01 02 03 04 05 06 07 08 09 10 11 12 2003
01 02 03 04 05 06 07 08 09 10 11 12 2004
01 02 03 04 05 06 07 08 09 10 11 12 2005
01 02 03 04 05 06 07 08 09 10 11 12 2006
01 02 03 04 05 06 07 08 09 10 11 12 2007
01 02 03 04 05 06 07 08 09 10 11 12 2008
01 02 03 04 05 06 07 08 09 10 11 12 2009
01 02 03 04 05 06 07 08 09 10 11 12 2010
01 02 03 04 05 06 07 08 09 10 11 12 2011
01 02 03 04 05 06 07 08 09 10 11 12 2012
01 02 03 04 05 06 07 08 09 10 11 12 2013
01 02 03 04 05 06 07 08 09 10 11 12 2014
01 02 03 04 05 06 07 08 09 10 11 12 2015
01 02 03 04 05 06 07 08 09 10 11 12 2016
01 02 03 04 05 06 07 08 09 10 11 12 2017
01 02 03 04 05 06 07 08 09 10 11 12 2018
01 02 03 04 05 06 07 08 09 10 11 12 2019
01 02 03 04 05 06 07 08 09 10 11 12 2020
01 02 03 04 05 06 07 08 09 10 11 12 2021
01 02 03 04 05 06 07 08 09 10 11 12 2022
01 02 03 04 05 06 07 08 09 10 11 12 2023
01 02 03 04 05 06 07 08 09 10 11 12 2024
01 02 03 04 05 06 07 08 09 10 11 12 2025
01 02 03 04 05 06 2026
Copyright 2006 naru
naruken diary system
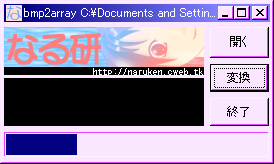 C#使ってみた。練習に画像ファイルを配列に変換するツール。
bmp2array.exe
実行には.NET frameworkが必要。
C#使ってみた。練習に画像ファイルを配列に変換するツール。
bmp2array.exe
実行には.NET frameworkが必要。
 コネクタ作ってみた。紙エポ基板を2枚重ねて、2.5mmのドリルで狭間に穴を掘る。
片方にスズメッキ線の電極を付ける。
2枚をスズメッキ線で縫い合わせて半田で固定。
取り込めてるけど、信頼性があやしい。
コネクタ作ってみた。紙エポ基板を2枚重ねて、2.5mmのドリルで狭間に穴を掘る。
片方にスズメッキ線の電極を付ける。
2枚をスズメッキ線で縫い合わせて半田で固定。
取り込めてるけど、信頼性があやしい。
 jujurouさんの情報から、Trevaのコネクタをヨドバシの携帯アクセサリ売り場で探すとあった。\470。
jujurouさんの情報から、Trevaのコネクタをヨドバシの携帯アクセサリ売り場で探すとあった。\470。
 32x32のルックアップテーブル(LUT)を生成して使うようにする。
32個までの隣接していて同じ色のラベルを一つのラベルにまとめられる。
まとめた後のラベルの数は32個まで。
下のテキストボックスがLUT。
抽象化したhex画像がノイジーでもラベリングのミスはかなり少なくなったけど。。。
32x32のルックアップテーブル(LUT)を生成して使うようにする。
32個までの隣接していて同じ色のラベルを一つのラベルにまとめられる。
まとめた後のラベルの数は32個まで。
下のテキストボックスがLUT。
抽象化したhex画像がノイジーでもラベリングのミスはかなり少なくなったけど。。。
 ラインの抽出できた(3段目の画像)。かなりやっつけ。
ラインの抽出できた(3段目の画像)。かなりやっつけ。
 モータドライバ。
今回は強力なモータを使用しないので、専用ICでいけそう。
だけれども、入手できるドライバICはHブリッジがバイポーラトランジスタで構成されてる。
バイポーラトランジスタでHブリッジすると、NPNのVceとPNPのVceで合わせて1.6V位無駄になる。
貧弱なモータでも、電池4本ではこの1.6Vが勿体無い。
FETならVdsを小さくできるからFETのHブリッジモータドライバICがあればいいんだけど。
貧弱なモータのためにディスクリートで組むほどの余裕は無いのでTA7291SGを使う。
モータドライバ。
今回は強力なモータを使用しないので、専用ICでいけそう。
だけれども、入手できるドライバICはHブリッジがバイポーラトランジスタで構成されてる。
バイポーラトランジスタでHブリッジすると、NPNのVceとPNPのVceで合わせて1.6V位無駄になる。
貧弱なモータでも、電池4本ではこの1.6Vが勿体無い。
FETならVdsを小さくできるからFETのHブリッジモータドライバICがあればいいんだけど。
貧弱なモータのためにディスクリートで組むほどの余裕は無いのでTA7291SGを使う。
 知ロボ。当日の超展開でチャレンジボールをゴールできた。
2次予選には残れなかったけど、目標は達成したので、
2年前の雪辱は果たした(つもり)。
カテゴリ「知能ロボットコンテスト2007」を追加。
ドキュメント化は時間ができたら。
知ロボ。当日の超展開でチャレンジボールをゴールできた。
2次予選には残れなかったけど、目標は達成したので、
2年前の雪辱は果たした(つもり)。
カテゴリ「知能ロボットコンテスト2007」を追加。
ドキュメント化は時間ができたら。